PRODUIT
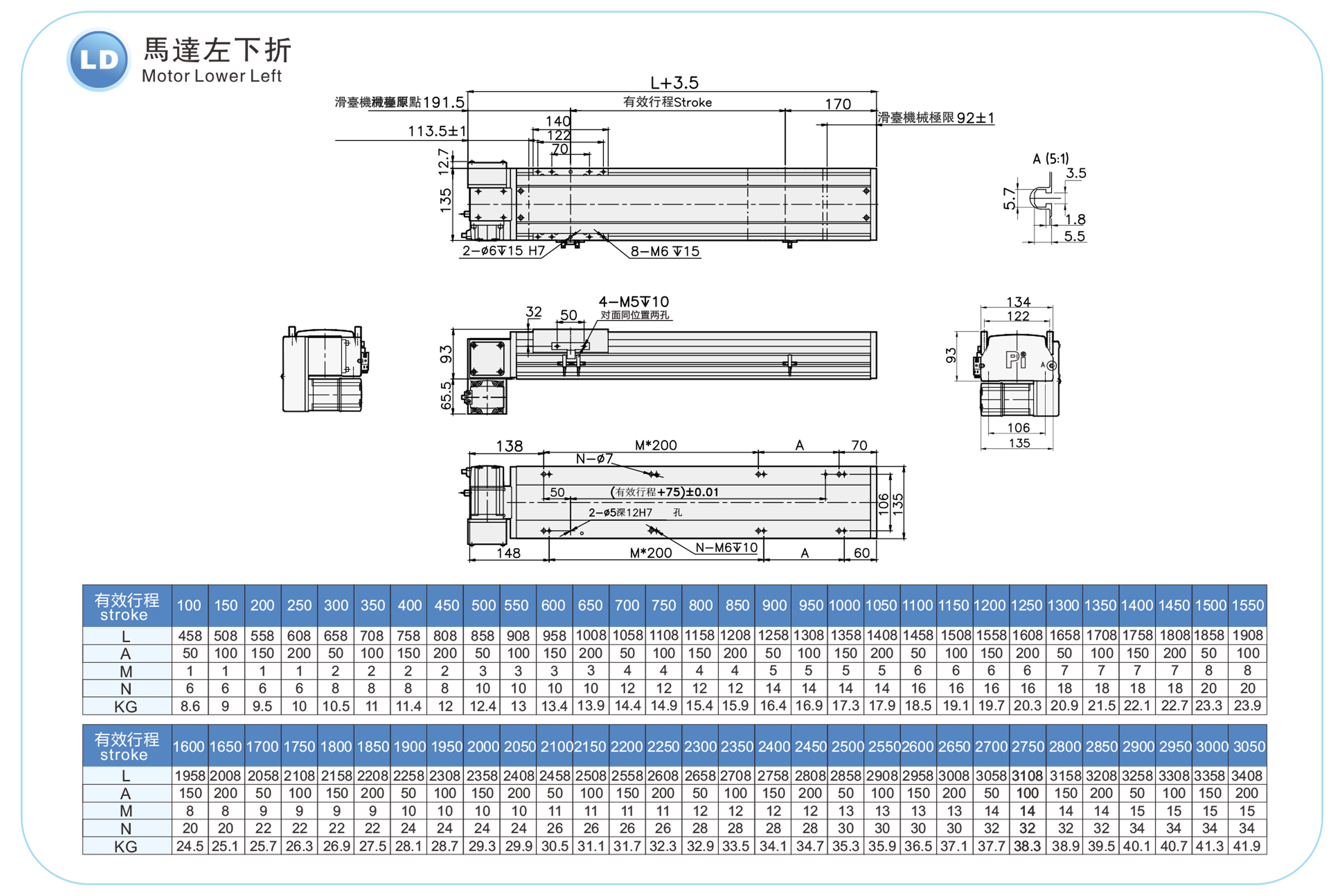
 Emplacement actuel:Accueil > Produit > Actionneur de courroie standard > Série RMP > RMP14S > Moteur côté supérieur gauche
Emplacement actuel:Accueil > Produit > Actionneur de courroie standard > Série RMP > RMP14S > Moteur côté supérieur gauche 
Répétabilité : ± 0,04 mm
Charge horizontale : 25 kg
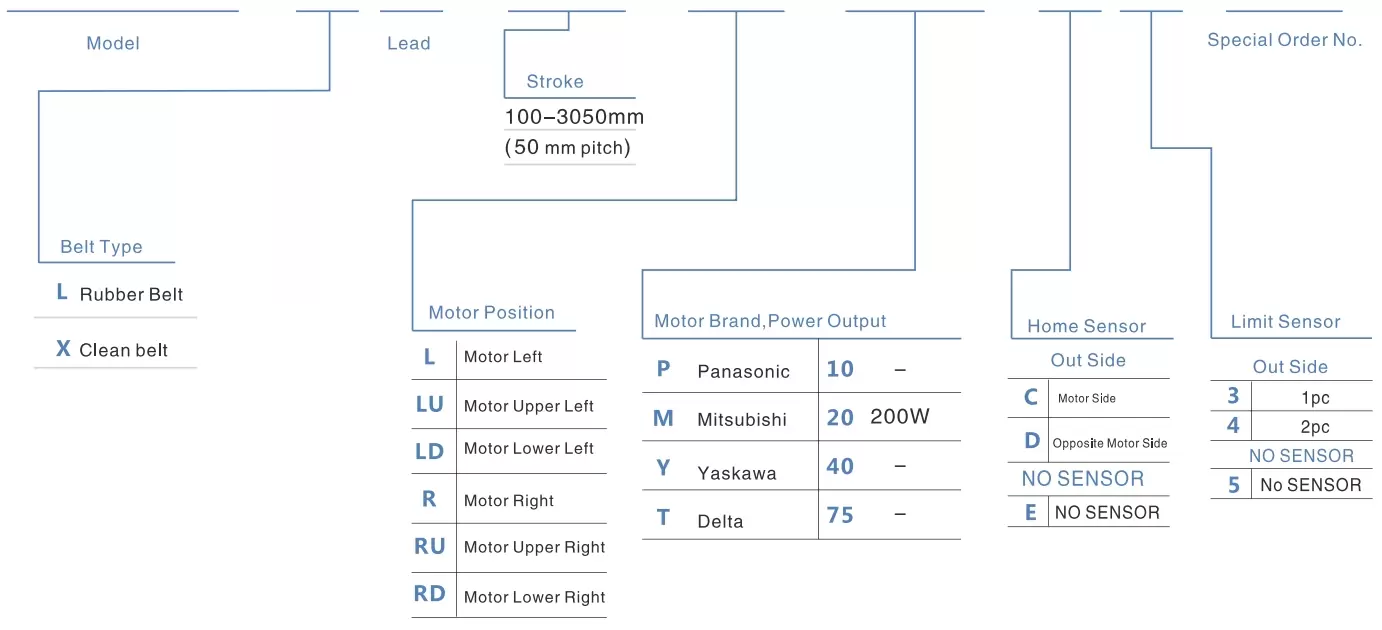
Plomb: 40 mm
Vitesse maximale : 2000 mm/s
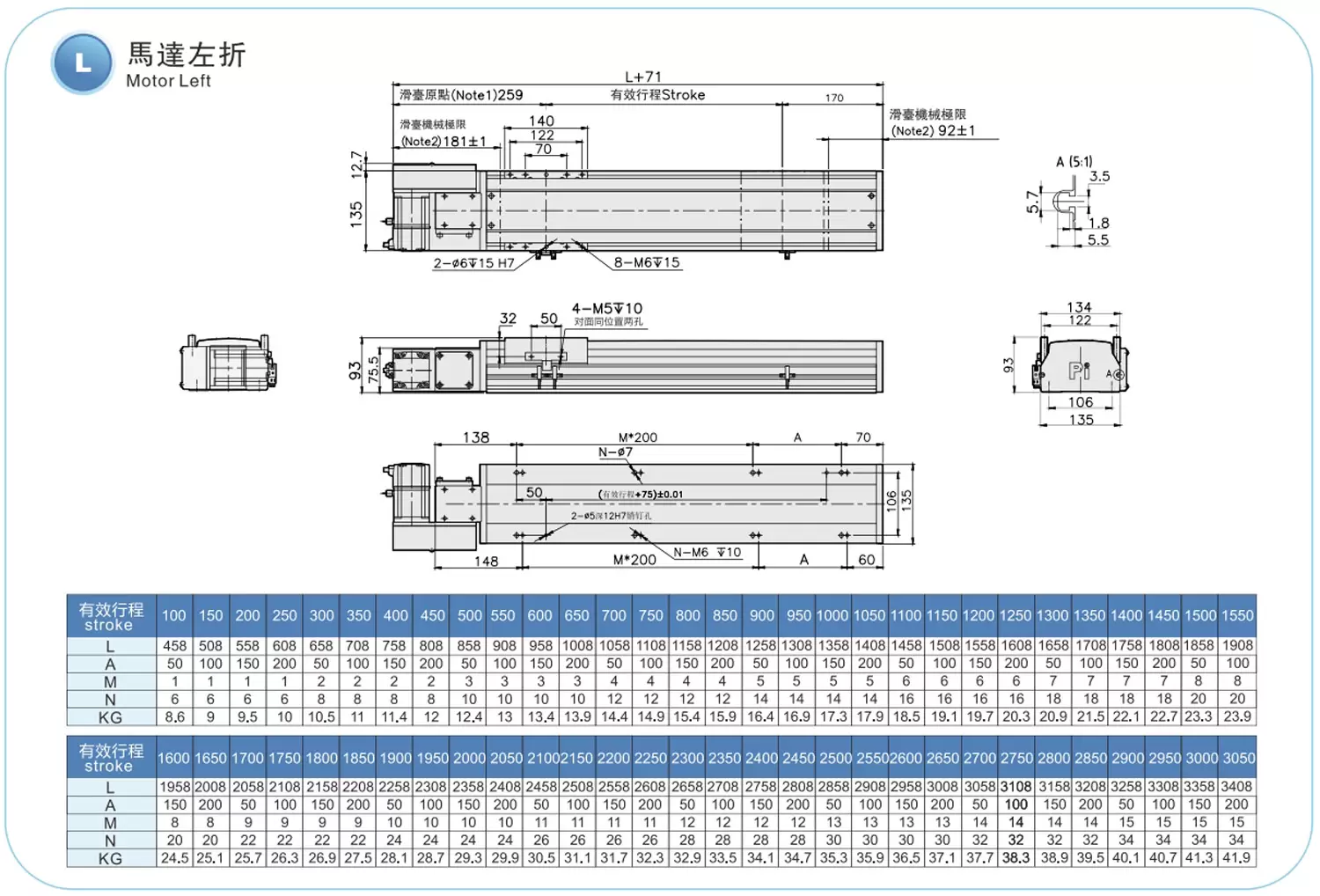
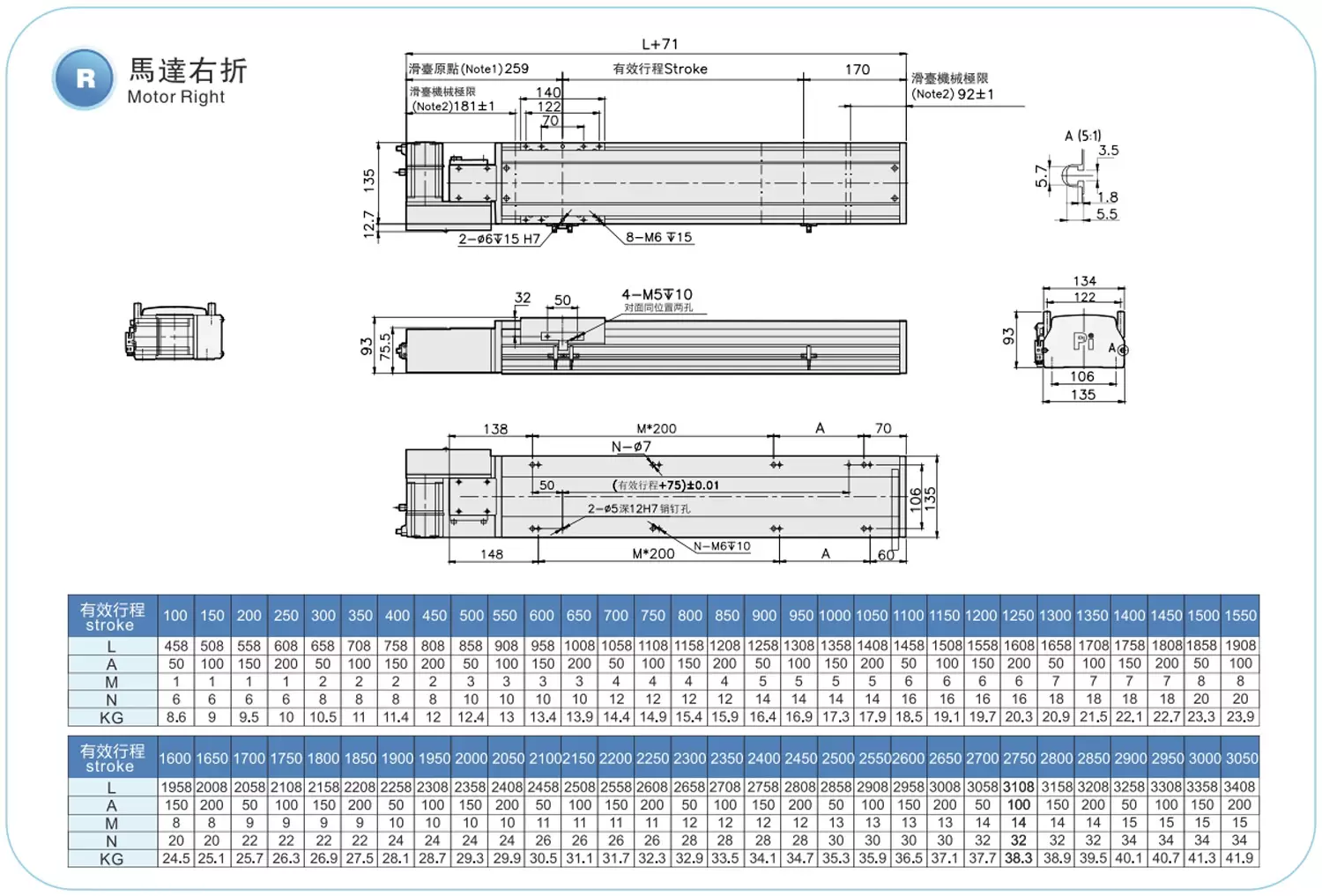
Pas de course : 100-3050 mm
Réglez l'accélération et la décélération du moteur sur 0,2 seconde.
Les spécifications standards ne peuvent pas être appliquées pour l’utilisation de grues inversées. Si vous avez des exigences, veuillez nous contacter par téléphone ou laisser un message en ligne.
Délai de livraison : 7-10 jours



| Spécification | Répétabilité (mm) | ±0,04 | |
| Plomb (mm) | 40 | ||
| Vitesse maximale (mm/s) | 2000 | ||
| Charge utile maximale | Horizontale (kg) | 25 | |
| Verticale (kg) | - | ||
| Poussée nominale (N) | 100 | ||
| Pas de course (mm) | Pas de 100-3050 mm/50 mm | ||
| Parties | Puissance du servomoteur CA (W) | 200W | |
| Largeur de la courroie (mm) | 22 | ||
| Guide linéaire à haute rigidité (mm) | L15XH12.5 | ||
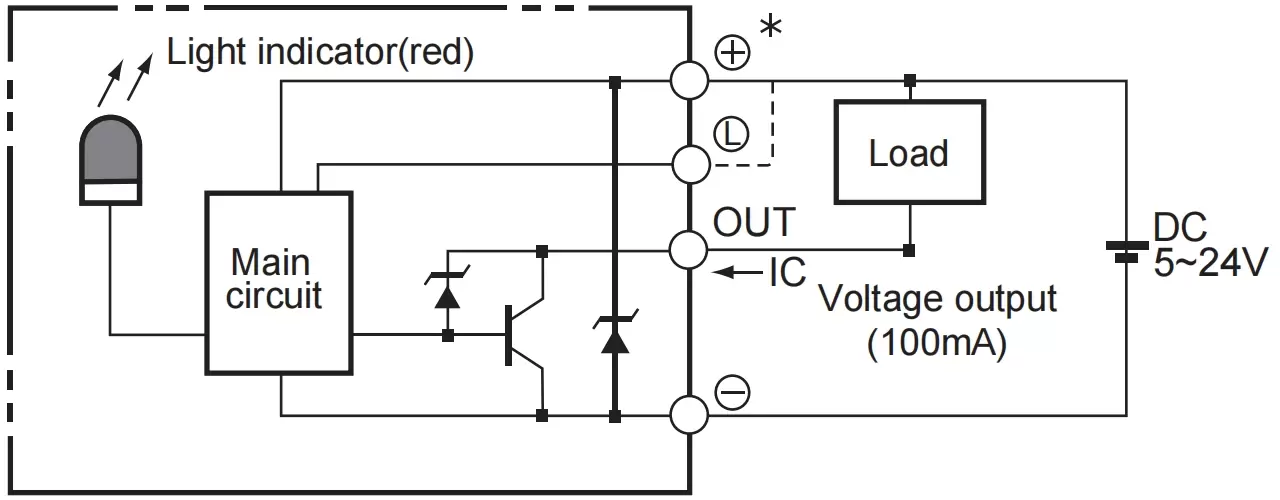
| Capteur domestique | Dehors | EE-SX672(NPN) | |
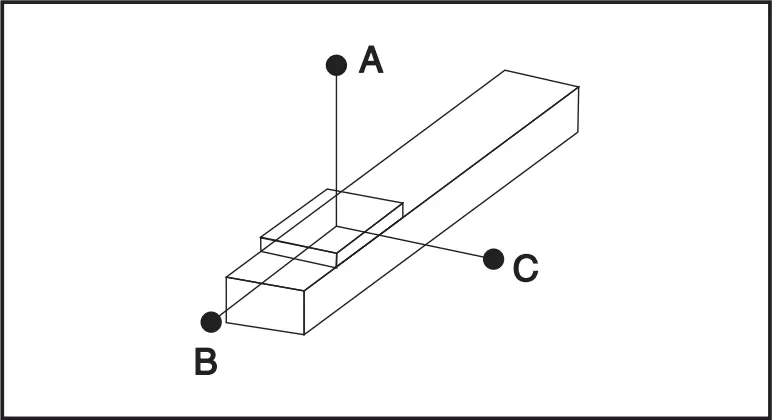
| Installation horizontale | UN | B | C |
| 10 kg | 1794 | 688 | 538 |
| 20 kg | 858 | 324 | 253 |
| 25 kg | 670 | 251 | 197 |
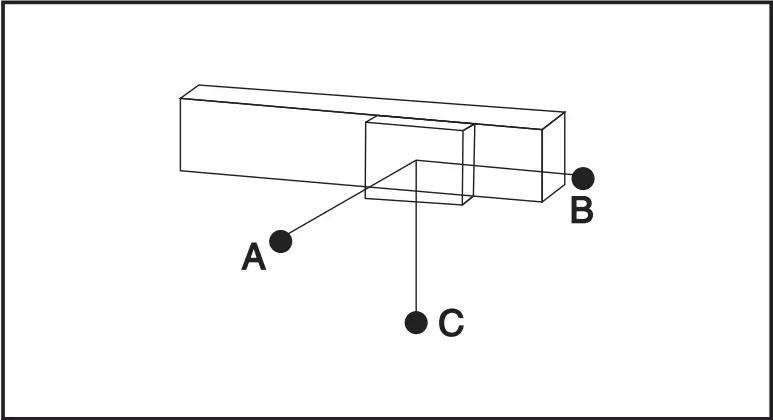
| Installation murale | UN | B | C |
| 15 kg | 348 | 446 | 1170 |
| 18 kg | 285 | 365 | 961 |
| 25 kg | 197 | 251 | 670 |
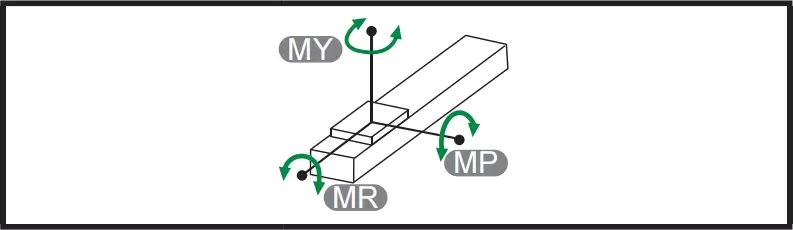
| MON | 551 |
| Député | 552 |
| M | 485 |
| Utiliser où | Mode piloté | Spécification du modèle | Mécanisme réducteur | Sortie moteur (w) | Largeur (mm) | Répétabilité (mm) | Spécification de la ceinture | Charge utile maximale (kg) | Vitesse maximale (mm/s) *1 | ||
|---|---|---|---|---|---|---|---|---|---|---|---|
| Largeur de la ceinture (mm) | Plomb (mm) | Horizontal | Verticale | ||||||||
| Standard | Ceinture | RMP14S | Oui | 200W | 135 | ±0,04 | 22 | 40 | 25 | - | 2000 |
| RMP17S | Oui | 400W | 170 | ±0,04 | 30 | 40 | 45 | - | 2000 | ||
| RMP22S | Oui | 750W | 220 | ±0,04 | 50 | 40 | 85 | - | 2000 | ||
| RMP28R | NON | 1000W | 280 | ±0,08 | 50 | 230 | 230 | - | 2000 | ||
| RMP28RN | NON | 1000W | 280 | ±0,08 | 50 | 230 | 200 | - | 2000 | ||
*1La vitesse la plus élevée est basée sur le régime maximal du servomoteur (3 000).
*La vitesse la plus élevée est basée sur le régime maximum du moteur pas à pas (500).









 PDF
PDF